

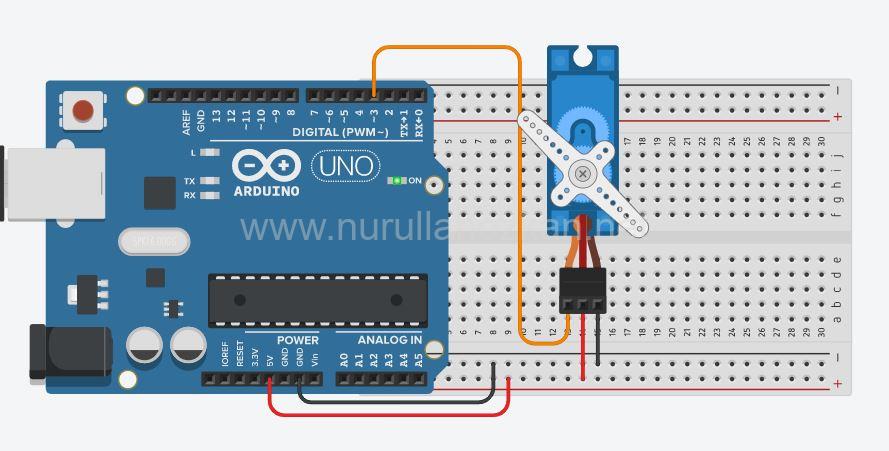
#include <Servo.h>
Servo servomotor;
void setup()
{
servomotor.attach(3);
}
void loop()
{
delay(30); // Wait for 1000 millisecond(s)
servomotor.write(45);
}
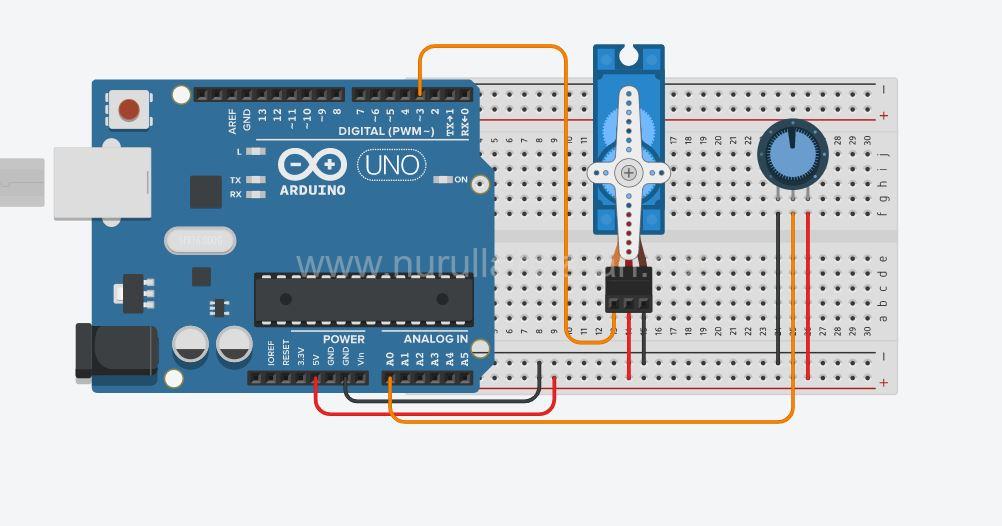
#define pot A0
#include <Servo.h>
int potdegeri;
Servo servomotor;
void setup()
{
Serial.begin(9600);
servomotor.attach(3);
pinMode(pot,INPUT);
}
void loop()
{
potdegeri=map(analogRead(pot),0,1023,0,180);
delay(30); // Wait for 1000 millisecond(s)
servomotor.write(potdegeri);
Serial.println(potdegeri);
}